Toyota CH-R: Funzionamento del monitoraggio punti ciechi
Oggetti che possono essere rilevati durante la guida
Il Monitoraggio punti ciechi utilizza i sensori radar laterali posteriori per rilevare le seguenti tipologie di veicoli che viaggiano nelle corsie adiacenti e avvisa il conducente circa la presenza di tali veicoli attraverso le spie poste sugli specchietti retrovisori esterni.
- Veicoli che viaggiano in aree che non sono visibili attraverso gli specchietti retrovisori esterni (punti ciechi)
- Veicoli che sopraggiungono rapidamente da dietro in aree che non sono visibili attraverso gli specchietti retrovisori esterni (punti ciechi)
Raggio di rilevamento durante la guida
Le aree in cui si possono rilevare veicoli sono indicate di seguito.
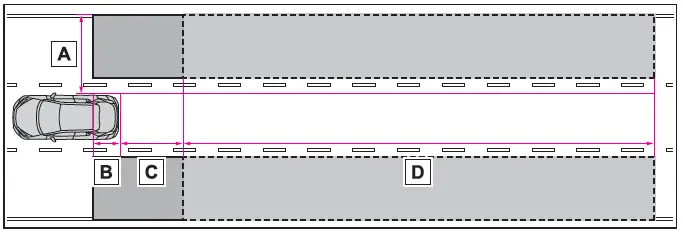
Il raggio di ciascuna area di rilevamento è:
- Circa da 0,5ma 3,5msull'uno o sull'altro lato del veicolo*1
- Circa 1min avanti dal paraurti posteriore*2
- Circa 3mcirca dal paraurti posteriore
- Circa 3m- 70mdal paraurti posteriore*3
*1L'area tra il fianco del veicolo e una distanza di 0,5mdal fianco del
veicolo non può
essere rilevata.
*2Mentre il veicolo viene sorpassato, sarà rilevato fino a circa 3min avanti dal
paraurti
posteriore.
*3Maggiore è la differenza di velocità tra il proprio veicolo e il veicolo
rilevato, maggiore
sarà la distanza a cui verrà rilevato il veicolo, e questo farà illuminare o
lampeggiare la spia
sullo specchietto retrovisore esterno.
Funzione collegata al monitoraggio punti ciechi
Il sistema LDA (Allarme allontanamento dalla corsia) ha una funzione che utilizza le informazioni dei veicoli rilevati in una corsia adiacente. Per i dettagli sulla funzione e sulle relative condizioni operative.
Condizioni di funzionamento del Monitoraggio punti ciechi
Il monitoraggio punti ciechi è operativo quando sono soddisfatte tutte le condizioni seguenti:
- L'interruttore di alimentazione è posizionato su ON.
- Il monitoraggio punti ciechi è attivato.
- Il cambio è in una posizione diversa da R.
- La velocità del veicolo è circa 10 km/h o superiore.
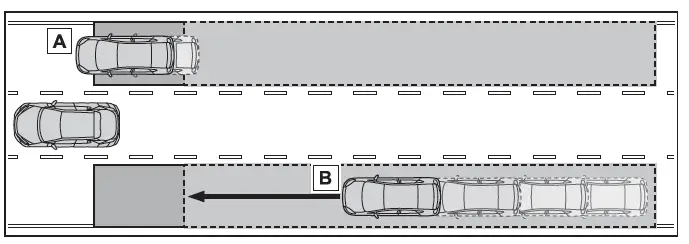
Condizioni di rilevamento di un veicolo del monitoraggio punti ciechi
Il Monitoraggio punti ciechi rileverà la presenza di un veicolo nell'area di rilevamento nelle situazioni seguenti:
- Un veicolo nella corsia adiacente effettua un sorpasso.
- Si effettua un lento sorpasso di un veicolo in una corsia adiacente.
- Un altro veicolo entra nell'area di rilevamento quando cambia corsia.
Situazioni in cui il Monitoraggio punti ciechi non è in grado di rilevare i veicoli
Il Monitoraggio punti ciechi non è in grado di rilevare i veicoli che seguono e altri oggetti:
- Piccole motociclette, biciclette, pedoni, ecc.*
- Veicoli che procedono in direzione opposta
- Guardrail, muri, cartelli, veicoli parcheggiati e altri oggetti immobili analoghi*
- Veicoli che seguono nella stessa corsia*
- Veicoli che procedono a 2 corsie di distanza dal proprio veicolo*
- Veicoli che vengono sorpassati rapidamente dal proprio veicolo*
*A seconda delle condizioni, il rilevamento di un veicolo e/o di un oggetto potrebbe verificarsi ugualmente.
Condizioni in cui un cicalino potrebbe non attivarsi
In situazioni come quelle indicate di seguito, mentre è azionata la leva degli indicatori di direzione, la spia lampeggia ma il cicalino potrebbe non attivarsi.
- Quando viene rilevato un secondo veicolo mentre la leva degli indicatori di direzione viene tenuta azionata
- Quando si sorpassa un veicolo in una corsia adiacente a una velocità molto superiore a quest'ultimo*
*A seconda delle situazioni, un cicalino potrebbe non attivarsi.
Condizioni nelle quali il sistema potrebbe non funzionare correttamente
- Il monitoraggio punti ciechi potrebbe
non rilevare correttamente i veicoli
nelle seguenti condizioni:
- Quando il sensore è disallineato a causa di un forte impatto subito sul sensore o sull'area circostante
- In presenza di fango, neve, ghiaccio, adesivi, ecc. che coprono il sensore o l'area circostante sul paraurti posteriore
- Durante la guida su una superficie stradale che è bagnata con acqua abbondante in presenza di cattivo tempo, per esempio pioggia scrosciante, abbondante nevicata o nebbia
- Quando più veicoli si avvicinano con solo una piccola distanza tra ciascun veicolo
- Quando c'è una distanza ridotta tra il proprio veicolo ed un altro che lo segue
- Quando la differenza tra la velocità del proprio veicolo e quella del veicolo che entra nell'area di rilevamento è significativa
- Quando la differenza di velocità tra il proprio e un altro veicolo cambia
- Quando un veicolo che entra nell'area di rilevamento viaggia all'incirca alla stessa velocità del proprio
- Quando il proprio veicolo parte da fermo e un altro veicolo resta nell'area di rilevamento
- Quando si percorrono salite e discese ripide consecutive, ad esempio pendii, avvallamenti nella strada o altro
- Quando si percorrono strade tortuose, con curve consecutive o superfici disconnesse
- Quando le corsie sono larghe o quando si guida sul bordo di una corsia e il veicolo nella corsia adiacente è molto lontano dal proprio veicolo
- Quando si monta un accessorio (per esempio un portabiciclette) sulla parte posteriore del veicolo
- Quando la differenza di altezza tra il proprio veicolo e quello che entra nell'area di rilevamento è significativa
- Subito dopo l'attivazione del monitoraggio punti ciechi
- Quando si effettua il traino con il veicolo
- Casi di rilevamento superfluo di un
veicolo e/o oggetto da parte del
monitoraggio punti ciechi possono
aumentare nelle situazioni seguenti:
- Quando il sensore è disallineato a causa di un forte impatto subito sul sensore o sull'area circostante
- Quando la distanza tra il veicolo e un guardrail, muro, ecc. che entra nell'area di rilevamento è breve
- Quando si percorrono salite e discese ripide consecutive, ad esempio pendii, avvallamenti nella strada o altro
- Quando le corsie sono strette o quando si guida sul bordo di una corsia e un veicolo che viaggia in una corsia non adiacente entra nell'area di rilevamento
- Quando si percorrono strade tortuose, con curve consecutive o superfici disconnesse
- Quando gli pneumatici slittano o pattinano
- Quando c'è una distanza ridotta tra il proprio veicolo ed un altro che lo segue
- Quando si monta un accessorio (per esempio un portabiciclette) sulla parte posteriore del veicolo
- Quando si effettua il traino con il veicolo

Toyota C-HR (AX20) 2023-2026 Manuale del proprietario
Pagine attuali
Iniziando nel mezzo di quello che appare sopra, settando il nostro dominio della bestia con l'immagine del nostro frutto alato
